Now that the Spring 2011 UAT Commencement is over I'm finally allowed to talk out it. The project that Ryan Carmain, Kasey Norman, Professor Mueth, and myself have been working on: 3 Synchronized Art Bots. Yes that is a mouthful so from now on I'll affectionately refer to them as the SAB crew, seeing as there are 3 of them. We made three of them in order to use three colors to both identify them and to have them paint: Red, Blue, Green. The bots movement is based off of both the noise made and the duration of that noise. With each bot focused in on a different range, their movements therefore aren't the same in dance mode. Dance mode being the mode in their programming where they react to the noise being created. The SAB crew was created to be used at UAT's Spring 2011 Commencement Ceremony and then got invited to demo at the 2011 PhoenixCon happening at the end of May. The bots come with a pamphlet that I put together myself as we went along detailing the creation both hardware and software wise. After the demo at PhoenixCon I'll be sure to post more video and pics of them.
So in the random crazy category I came up with another one. What if you didn't have to worry about lugging around two separate cables for your iPod or other MP3 player? Why carry around headphones and an audio aux cable? I decided to combine the two, to create an audio aux cable with an interchangeable headphone topper. Changing two different cables into one as well as allowing for customization depending on the type of headphone you prefer [Circumaural, Supra-aural, earbuds, or in-ear monitors]. This being a mostly hardware task I decided to see how much of it I could do on my own, so I began with getting a cheap aux cable and a cheap set of earbuds to take apart.
As far as research goes I of course looked into aux cables and their standards as well as layout, as well as the same for headphones. Taking into account that to start off with I would be taking apart two different types of wires and making the play nice together, I need to know the intricacies of each separate part. The aux cable I'll be taking apart and working with during the first part of this endevour is a black audio aux cable purchase through Buy.com measuring 1.5 m long and an interface of 3.5 mm to 3.5 mm on each end. There fore the headphone toppers will have to be made for a 3.5 mm interface, so the second order of business would be to manufacture and connect a female 3.5 mm interface onto the headphones.
I'll make sure to give you all an update when the new semester starts and I really jump into this new project. ^^
So I was just browsing Hack-A-Day and came across several different QuadCopter projects, which got me thinking. Why don't we take the best features of all of them, combine them together, and add a swarm mentality? They'd be able to map out an area in second by relaying information back to "home base" or your computer and they'd be able to lift and transport pretty much anything back to a specified location. Yes these crazy jumps is how my brain works and for a Robotics student it means alot of crazy projects. Now that I had an idea and jumping off point I needed to pick a name and a team for the project so I chose the name MetalMen in honor of the 1962 American comic of the same name [Metal Men], a team of robot superheroes that DC published. I thought the name was appropriate considering the idea of each QuadCopter working together as a whole for a goal.
Now the team was a more interesting pick, because in a University that is so small I personally knew all of the robotics students. Which meant I knew their skills and had to pick which ones would work best for this project. Given what I needed for this to work I picked Kasey Norman, Ryan Carmain, and Jon Geller to help me with this based off of their skills and the scope of the project.
So for our base platform we've broken down several projects that have taken on QuadCopters. Those being CrazyFlie, ArduIMU QuadCopter, OpenSource QuadCopter, and AeroQuad to learn from them what works and improve it for our own purposes. This review of what has been done to combine what works and further push something is how one side of robotics works, the other side of course being completely insane and doing something never even thought of before. A nice balance of doing both helps keep your skills up and you from going completely crazy.
As soon as I start my next semester at UAT and so start jumping on this project I'll let you guys know what is going on with it. ^^
So~ a friend, Scott, and myself decided that not enough people knew just how many powerful females there are in the comic book/superhero world. And having a blog now puts me in a position to change that so with out further ado, after much research and compiling here is a list of all the super powerful females found.
~ Superheroes ~
A
Agent 13 Angel Salvadore
Arachne Ariel Armor Atom Girl Aurora
B Batgirl I Batgirl II Batgirl III Batgirl IV Batgirl V Batgirl VI Big Barda Binary Black Canary I Black Canary II Black Cat Black Widow Black Widow II
Bling! Blink Boom Boom Boomer
C Cat Cat II Claire Bennet
Crystal
D Dagger Daphne Powell Darkstar Dazzler Domino
E Elastigirl Elektra Emma Frost
Energy
F Fighting Spirit Firebird Frigga
H Hawkgirl Hawkwoman I Hawkwoman II
Hawkwoman III Hellcat Hit-Girl Hollow Hope Summers Huntress
Husk
I Invisible Woman Isis
J Jean Grey Jennifer Kale Jessica Sanders Jolt Jubilee
L Light Lass Liz Sherman Luna Lyja
M Marvel Girl Maya Herrera Medusa Meltdown
Mera Meteorite Minna Murray Misfit Miss Martian Monica Dawson
Moonstone Ms Marvel Ms Marvel II
N Namora Namorita Niki Sanders
O Oracle (DC)
P Penance I Phantom Girl Phoenix Power Girl Psylocke
R Renata Soliz Ripcord Rogue
S Sage Shadowcat She-Hulk She-Thing Shriek
Shrinking Violet Silk Spectre I Silk Spectre II Silverclaw Snowbird Songbird Spider-Girl Spider-Woman Spider-Woman II Spider-Woman III Stacy X Stargirl Stephanie Powell Storm Supergirl
T Tempest Thor Girl Thundra Tigra Tracy Strauss Triplicate Girl
U Ultragirl
V Vagabond Valerie Hart
Valkyrie Vertigo II Vindicator II Violet
W Warbird Wasp White Queen Wolfsbane Wonder Girl Wonder Woman Wondra
So I've been working on alot of projects since I've started college at UAT, in only a year and a half I feel like I've expanded my skills and hope that continues. But I've also met some really amazing people who I'm glad I had a chance to get to know, and though some terrible things have happened this past year and a half like that loss of my Uncle John to cancer, I have also had a chance to find things to help me get through it. One of those being Tania Katan's book "My One Night Stand With Cancer" the other being an awesome net of friends who are just as geeky and crazy as me. We might not be normal by any standard set by society but you'll probably never find a closer group of college students who generally look out and care about what is going on with each other, who came from all over the US to this one college because they love something totally beyond geeky and who end up making and sharing amazing bonds because of it. So this post is for a few reason: To honor a man who effected me more then I can ever explain, my Uncle John. To thank a woman who wrote something that touched me during my period of mourning, Tania Katan. And to all of my crazy UAT friends who keep me just sane enough to not go completely insane but that also encourage letting me go for all the crazy ideas that pop into my head. Thank you, all of you I really don't know what I would do without you guys.
Since I run Robotics club we do some pretty random but really cool looking things in there so I figured I'd toss up some pictures of what we've done in there up here and if anyone wants to know what something is or does they can comment and I'll explain it. But since I'm the only one that reads this blog I don't think that's going to happen anytime soon. ^^"
Eventually we settled on a design, and started the manufacturing ourselves. Yes we measured, cut, and built everything in lab for the new design.
So with the new design now mounted and Thing 1 rocking a sexy new body we knew we needed to start mounting some sensors on so we could let the software guys go at it. While we were working on getting the sensor mounts manufactured and worked out, we needed to curb down the Rover's raw power a bit. Considering these puppies can get up to 15 mph if they wanted to, though they easily hold steady at 10 mph like no problem, and that the competition said we had to be well below 5 mph we
had some work to do. Ramp down the power of the Rover with out totally messing up the skid steering of the bot, which we had some problem doing. That and the engine kept stalling on hard or sudden changes in directions. After awhile we got all of it figured out and did another couple of test runs, as you can see below. But since we didn't want to mess up the new designed body just yet we used Thing 2 to run the speed, ramping, skid steering, and other hardware tests.
Also we had to design and add an emergency stop button with its own circuit, that though the prototyped circuit worked when it was transferred over just didn't want to play nice
and work for us. After banging out heads against the wall
for quite awhile it finally magically fixed itself and the emergency button was mounted to the back of Thing 1 above the computer. It really has been alot of fun working on this project so far and kind of unnerving at the sametime. This is the first competition of this nature our University has ever entered into, since UAT is actually a new university that's still trying to build up as much steam as some of the bigger names in this area already have. I think being in this will help us alot with that, as long as we finish the track I'll be happy. No meltdowns, no explosions, no burnanation of either Rover at IGVC and I will consider all of my work a success.
So~ this project is from a while back, like one of my first semesters here but I figured I'd post it up anyways so that you all can see it. Pretty much its was a final project demonstration by Ryan Carmain, myself, and Leonard Hockett of our Accelerometer controlled robot. This project was for my RBT173 - Introduction to Microcontrollers. The controller uses an accelerometer to sense the direction of gravity, which is sent over a serial connection to the robot, and translated into motor commands.
So IGVC is a robotics competition, well an intelligent ground competition to be exact. The challenge is to design, build, and compete with a mobile autonomous vehicle that you're team came up with. So for our entry we picked the name Nameless Microwave thanks to a random punk band name generator, and we were off like a rocket with design for the bot. Now in the lab there had been these Rovers that had just been sitting there for god knows how long to the point where there speed belts were gone, there was a leak in the hydraulic pump and no one could remember if they ran or not since they hadn't been taken outside in forever. We decided to use these as our base for our competition bot and since the lab conveniently had two of these things laying around we were going to make carbon copy bots just on the outside chance we had a complete hardware meltdown while at the competition. And so the Nameless Microwaves gained the bots affectionately known as Thing 1 and Thing 2. Once again being the hardware lead [what can I say I like have a tangible finished project] I had to get these bots to the point where they actually ran so that we could start designing and changing them while maintaining an inherent base functionality. So my hardware team and I went grease monkeys for awhile and changed speed belts, plugged the hydraulic pump leaks, got the motor running, secured gas lines [yes it is gas powered] till we finally got it running. YAY! So the video below is a little old but I remembered I had already posted it somewhere, so its a video of after we'd gotten everything repaired and running to show it could work. I'll try and put up some more recent stuff once I get done with a demo run of another project I'm doing. ^^
Augmented Reality is the name given to the idea of being able to interact and change the world around you in real time.“Augmented reality (AR) is a term for a live direct or indirect view of a physical real-world environment whose elements are merged with (or augmented by) virtual computer-generated imagery - creating a mixed reality.” It is implemented through three base hardware categories:display, mobile computing power, and the tracking system.
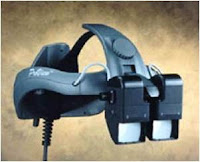
The display category can further be broken down into different areas of AR; each has its own benefits for different circumstances.Head-mounted display allows the user to interact and augmented the world around them while being fully immersed in it and still maintaining full mobility.
Handheld displays allow the user to still retain full mobility without having to immerse themselves into the AR; this is also the most likely candidate for mass production for consumers. Lastly spatial AR allows for use in the home, full interaction, limited mobility, and little to no immersion. For the most part this is using a webcam or some kind of camera and projector set-up. You'll find this type most commonly used now with online stores allowing you to print off a tag to "try" on their clothes to see how you like it.
For the most part all mobile computing power is referring to is the GPU or graphical processing unit. It seems kind of far strung and super high gadgetry but really for the most part it is a graphics card. Since the only computing needed is the coding and graphics being streamed to it, it is easier and smoother to use a GPU rather than a full computer system which breaks the work into two different chunks to send to the CPU and the graphics card, which then has to be put back together later down the road and cause a lag in the system between seeing a tag, recognizing it, and displaying the corresponding image.
Tracking is a matter entirely in and of itself. For the whole AR system to work it needs to be able to tell where it is in space and any movement deviation made from that point. This particular area is also where the greatest lag in AR systems is typically produced since most tracking systems being used at this point aren’t as sensitive as the systems need them to be.The best options right now would be one of the following: multiple GPS signals, differential GPS, real-time kinematic GPS, and the HiBall tracking system. As a personal suggestion, the HiBall tracking system seems to be the best bet at the moment for groups looking into experimenting with AR as its systems resolves linear motion of less than .2 millimeters, angular motion of less than .03 degrees, and an update rate of more than 1500 Hz with a latency of about 1 millisecond. Making it the best solution to the lagging problem commonly found in AR systems at this point in time.
Now that I've tossed all of that information at you at once, with your mind reeling at what AR
actually is and a bit of what is behind it I'm going to strike again. You see AR around you all the time and probably don't even know it. That nifty yellow line when you're watching the football
games? AR. The projection of Princess Leila calling for help? AR. The targeting system, health bar, radar, ammo bar, and about every other overlay in all of those games you've played? AR. Well off of that is just AR at its most basic of course, just kind of sprinkled in and not used to its fullest potential. So what is AR capable of doing right now?
Just off the top of my head AR today could feasibly be used in gaming, advertising, as support for complex task such as surgery, navigation devices, industrial application, military and emergency services, prospecting, architecture, sightseeing, collaboration, entertainment, education, art, and god knows what else if you just think outside of the box! Not too bad for right now huh? It really doesn't even take much to make some of that come to life, in fact alot of people have been working on different aspects of that. Just look at what the Playstation guys below have been doing by using AR for games.
That's just what we can do with AR right now, what about in the future? What are some of the crazy insane things we can look forward to maybe seeing come out of this? Well how about expanding your PC screen to your entire environment, enhancing media, virtual conferences, replacing cell phone and car navigation screens, virtual changing decor, virtual gadgets to help with everyday life, and subscribable group-specific AR feeds. Pretty crazy huh? You're probably thinking that this is way out of anybodies league except maybe the big time hot shots like the PlayStation guys above. If that's the case you'd be wrong. Then we wouldn't have this project. Or this one. Or this crazy person, or this one, or this guy. There are sooooooo~ many AR things and projects going on right now as so many different people begin to play in the budding and infant field. There really is no limit to what you can do with this stuff, you've just got to use that imagination a little.
Now I do alot of crazy stuff at UAT for the simple reason that I think its cool which means I want to know how it works. One of those crazy things I jumped into with in my first couple of semesters here was AR or Augmented Reality. AR has limitless possibilities in every possible field or discipline you can think of, you just have to be crazy enough to think outside of the box.
Being that I go to a whole University of like minded individuals in that aspect and we all have different areas of expertise [Game Design, Programming, Robotics, 3D Art and Animation, NetSec, Open Source] we decided to get together in a project group soon to turn business called ARinsanity. Got the punny haha part there?
So one of the major projects ARinsanity has taken on this semester is helping out a fellow member, Alicia Preston, with her SIP project.
Now at UAT to graduate we, among other requirements, we have to have a Senior Innovations Project. Something no one has done before that improves something or that is just really freaking cool. I myself prefer the SIPs that are both like the one I'm about to talk about.
Now Alicia's project involves hacking into the awesome untapped potential of the XBOX360's Kentic [I'll rant on the unlocked potential of it in another post], combining it with AR and an open source 3D modeling program that's already out there so that the user is actually interacting and creating their model in real time. Like if they were still modeling the old school clay way but with a lot longer list of what they can make and what materials they can make those items out of in the digital world. So~ my part in all of this is the crazy hardware person and as such I'll try and keep you guys up to date on all my cool little gadgets that are going to have to spawn to make this project happen. And if you all are really nice then I might even do a blog going more in depth into what AR is, how can you do it, and what are some of the cool projects you all at home can do with it.
So for some reason my younger brother is always bugging me to build him a Transformer just because I'm a robotics student and he is obsessed with the idea of actually having one. Though I think he fails to realize it would have to be a sentient being to be a legit Transformer or at the very least have a really kick-ass AI and then we'd be saying hello to our own really life version of the Terminator but with much bigger bots that we'd mistake for our own vehicles. But to kind of placate him a bit I decided to show everybody that there is actually a step towards robots that can change what they are depending on what function they need to preform. Now its not something as insane as a car that transforms into a evil fighting kick-ass robot with laser swords, its actually something I find out cooler. A self folding origami bot. Yes that's right, an origami bot.
Now right now it can't do alot of things but think of the potential. You could have a single sheet become whatever you needed at that time. A phone, a laptop, an umbrella, a purse, a wallet, keys, a hat. Whatever you wanted it could fold and mold itself to your needs. Do you know how insanely awesome this could be yet?
Okay so I met the guy who came up with this idea, Miguel Jardine, at a TEDx Scottsdale talk last night. It really is an amazingly out there idea with a lot of potential. Pretty much you can have a self-sustained gardening system and you don't even need water. Hm.... no water, we're in a desert with little to no water... I say UAT should look into using this to take over a small part of that empty lot we own to experiment! No breaking ground or construction needed so it doesn't step on anyone's toes. So you should check it out here.
I mean seriously check out some of the pictures from the stuff Miguel grew during the middle of a summer here. The look so yummy and fresh!
Not only that but the system is simple enough where anyone can be taught how to maintain and set up this system. Pretty much what you see in the picture about is a long tube of Earthworms and coconut husks, the base of the VermiSoks system. You then take the waste produced by restaurants or CAFES [I'm looking at you Cuban Pete's] and the biodegradable stuff gets liquefied and feed into these tubes where they feed the Earthworms and then the Earthworms create this super nutrient rich environment for you to grow on. Kind of awesome huh?
Okay so maybe a few of my posts are going to be influenced by the TEDx talk I went to last night, mostly because my head started exploding with all these ideas because of the talks. So I issue a challenge to all my smarty fellow Robotics students [you can do this too Mueth], and any blog readers out there are more then welcome to join in as well. I want you to take 2 or more things and merge them in such a way to improve both their designs and functionality. To increase there aesthetic pleasure as well massively improve there use. Now at this point you're like WTF Kayla really? Yes, really. Its not hard I promise, I came up with like 3 really awesome ideas while just waiting for my ride to pick me up after the TEDx event. ^^ It was kind of funny seeing me trying to write down and draw them out as quickly as possible before I forgot them. And by the way this challenge is inspired by a Mr. Derren Petrucci who gave an amazing talk and who I think would be a good person for UAT's crazy Robotics division to work with~ *hinthintMuethhinthint*

 So I was just browsing Hack-A-Day and came across several different QuadCopter projects, which got me thinking. Why don't we take the best features of all of them, combine them together, and add a swarm mentality? They'd be able to map out an area in second by relaying information back to "home base" or your computer and they'd be able to lift and transport pretty much anything back to a specified location. Yes these crazy jumps is how my brain works and for a Robotics student it means alot of crazy projects. Now that I had an idea and jumping off point I needed to pick a name and a team for the project so I chose the name MetalMen in honor of the 1962 American comic of the same name [Metal Men], a team of robot superheroes that DC published. I thought the name was appropriate considering the idea of each QuadCopter working together as a whole for a goal.
So I was just browsing Hack-A-Day and came across several different QuadCopter projects, which got me thinking. Why don't we take the best features of all of them, combine them together, and add a swarm mentality? They'd be able to map out an area in second by relaying information back to "home base" or your computer and they'd be able to lift and transport pretty much anything back to a specified location. Yes these crazy jumps is how my brain works and for a Robotics student it means alot of crazy projects. Now that I had an idea and jumping off point I needed to pick a name and a team for the project so I chose the name MetalMen in honor of the 1962 American comic of the same name [Metal Men], a team of robot superheroes that DC published. I thought the name was appropriate considering the idea of each QuadCopter working together as a whole for a goal.

 J
J





 Eventually we settled on a design, and started the manufacturing ourselves. Yes we measured, cut, and built everything in lab for the new design.
Eventually we settled on a design, and started the manufacturing ourselves. Yes we measured, cut, and built everything in lab for the new design.


 The display category can further be broken
The display category can further be broken  Handheld displays allow the user to still retain full mobility without having to immerse themselves into the AR; this is also the most likely candidate for mass production for consumers. Lastly spatial AR allows for use in the home, full interaction, limited mobility, and little to no immersion. For the most part this is using a webcam or some kind of camera and projector set-up. You'll find this type most commonly used now with online stores allowing you to print off a tag to "try" on their clothes to see how you like it.
Handheld displays allow the user to still retain full mobility without having to immerse themselves into the AR; this is also the most likely candidate for mass production for consumers. Lastly spatial AR allows for use in the home, full interaction, limited mobility, and little to no immersion. For the most part this is using a webcam or some kind of camera and projector set-up. You'll find this type most commonly used now with online stores allowing you to print off a tag to "try" on their clothes to see how you like it. Fo
Fo





